Eine lineare Kombination ist der sauberste Weg, aus vorhandenen Vektoren einen neuen Vektor zu erzeugen. Genau darum geht es hier: Ich zeige dir, wie der Rechenweg aussieht, wie du eine Darstellung prüfst und warum das Thema eng mit Spannraum, Basis und linearer Unabhängigkeit zusammenhängt. Dazu bekommst du Beispiele aus der Ebene und dem Raum sowie die Fehler, die in Aufgaben am häufigsten Punkte kosten.
So behältst du die wichtigsten Regeln sofort im Blick
- Vektoren werden mit Zahlen gewichtet und anschließend addiert.
- Die Koeffizienten dürfen positiv, negativ oder gebrochen sein.
- Ob ein Vektor darstellbar ist, entscheidet meist ein lineares Gleichungssystem.
- Eine Basis liefert eindeutige Koordinaten, ein abhängiges System oft nicht.
- In Technik, Grafik und Datenanalyse taucht dieselbe Idee ständig wieder auf.
Was eine Linearkombination von Vektoren wirklich ist
Ich formuliere es so: Wenn du Vektoren a, b und c mit Zahlen r, s und t multiplizierst und die Ergebnisse addierst, entsteht ein Ausdruck wie r·a + s·b + t·c. Das ist eine lineare Kombination. Die Zahlen heißen Koeffizienten oder Skalare; sie steuern, wie stark jeder Vektor eingeht. Wichtig ist dabei: Die Koeffizienten müssen keine ganzen Zahlen sein. Auch 0,5, -3 oder 1/4 sind erlaubt.
Genau deshalb ist das Thema so nützlich: Mit derselben Grundidee kannst du strecken, stauchen, spiegeln und addieren. Rein rechnerisch ist das simpel, geometrisch steckt aber schon die ganze Logik der linearen Algebra darin. Wie man das sauber nachrechnet, zeige ich im nächsten Schritt.
So prüfst du eine Darstellung Schritt für Schritt
Ich prüfe eine solche Darstellung am liebsten als kleines lineares Gleichungssystem (LGS). Der Zielvektor wird komponentenweise mit der unbekannten Kombination verglichen, und daraus ergibt sich, ob passende Koeffizienten existieren.
- Setze für die unbekannten Gewichte Variablen an, etwa r und s.
- Schreibe die Vektoren komponentenweise nebeneinander.
- Gleiche jede Komponente separat ab.
- Löse das lineare Gleichungssystem.
- Prüfe, ob die Lösung vollständig und widerspruchsfrei ist.
Ein kurzes Beispiel: Aus a = (1, 1) und b = (2, -1) soll x = (4, 1) entstehen. Dann setze ich r·a + s·b = x an. Komponentenweise ergibt das r + 2s = 4 und r - s = 1. Die Lösung ist r = 2 und s = 1, also x = 2a + b. Genau solche Rechnungen sind in Schule und Grundkursen typisch.
Falls das System keine Lösung hat, liegt der Zielvektor außerhalb des Spannraums der Ausgangsvektoren. Anschaulich wird das besonders gut, wenn man dieselbe Rechnung geometrisch liest.
So sieht das geometrisch aus
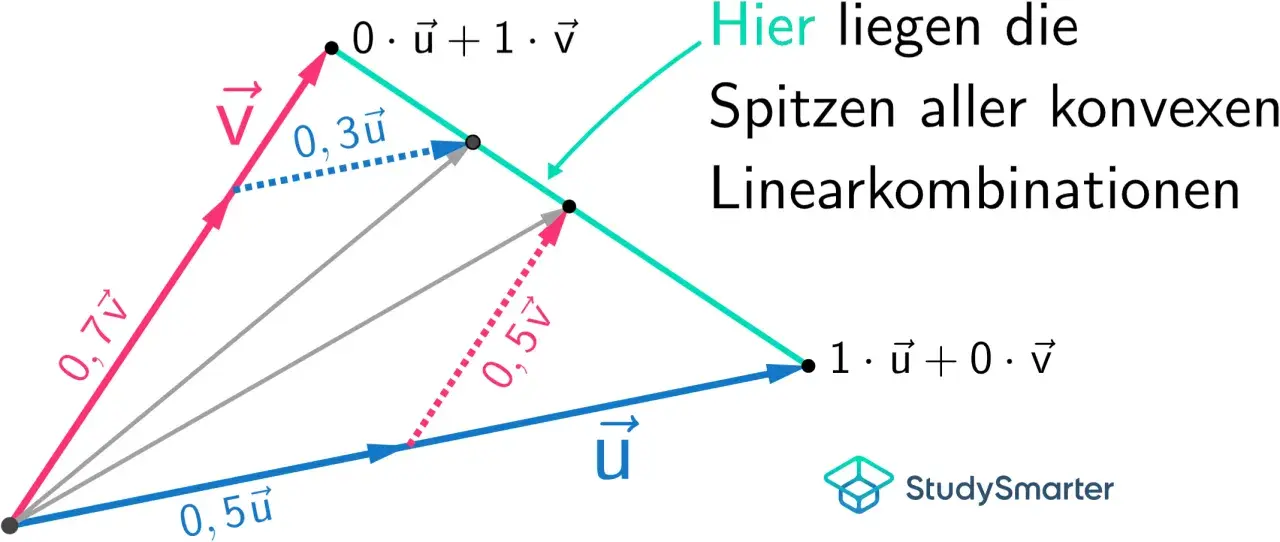
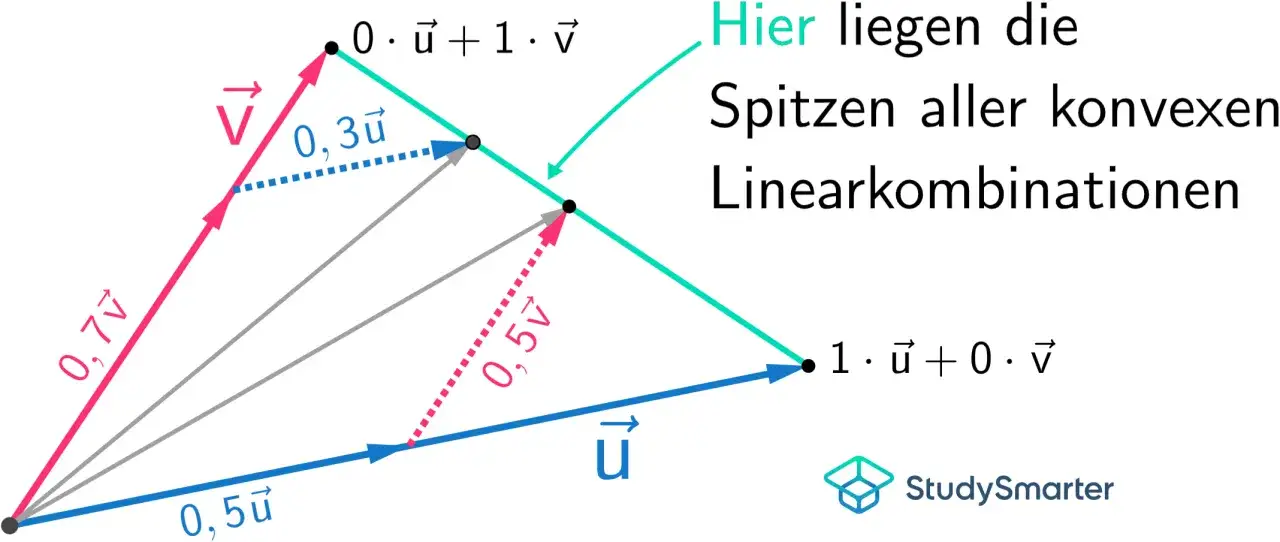
In der Ebene kann ich eine lineare Kombination oft als Pfeildiagramm lesen. Ein Faktor größer als 1 streckt den Vektor, ein Faktor zwischen 0 und 1 staucht ihn, und ein negativer Faktor dreht ihn um 180 Grad. Danach werden die so veränderten Pfeile addiert. Das Ergebnis ist der neue Vektor.
- Bei zwei Vektoren entsteht das Ergebnis oft als Diagonale eines Parallelogramms.
- Ein Koeffizient 0 entfernt den zugehörigen Vektor vollständig aus der Summe.
- Mit drei Vektoren wird die Zeichnung in R3 schwieriger, das Prinzip bleibt aber identisch.
- Brüche und negative Zahlen sind kein Sonderfall, sondern ganz normaler Teil der Methode.
Ich halte die geometrische Sicht für mehr als nur eine Lernhilfe. Wer sie beherrscht, erkennt schneller, ob eine Rechnung plausibel ist, statt nur blind Formeln zu schieben. Daraus ergibt sich direkt die Frage, welche Vektoren überhaupt genug Freiheit liefern.
Wann daraus Spannraum, Basis und Eindeutigkeit werden
Eine lineare Kombination beschreibt nicht nur einen einzelnen Rechenweg, sondern auch den Bereich aller Vektoren, die aus einer gegebenen Menge erzeugt werden können. Dieser Bereich heißt Spannraum oder lineare Hülle. Wenn ich sage, ein Satz von Vektoren spannt den Raum auf, dann meine ich: Mit ihren linearen Kombinationen erreichst du genau die Vektoren dieses Raums.
Der nächste Schritt ist die Frage nach der Eindeutigkeit. Sobald die Ausgangsvektoren linear unabhängig sind, lässt sich ein Vektor in ihrem Spannraum eindeutig darstellen. Sind sie abhängig, gibt es Redundanz: Einer der Vektoren steckt schon in der Kombination der anderen. Dann können mehrere verschiedene Koeffizienten zum selben Ergebnis führen. Eine Basis ist in diesem Sinn die knappste Form eines Erzeugendensystems: genug Richtungen für den ganzen Raum, aber keine überflüssigen.
| Begriff | Was er bedeutet | Was du daraus ableitest |
|---|---|---|
| Linear unabhängig | Kein Vektor lässt sich aus den anderen zusammensetzen. | Die Koordinaten eines Vektors sind eindeutig. |
| Linear abhängig | Mindestens ein Vektor ist schon eine Kombination der übrigen. | Es kann mehrere Darstellungen geben. |
| Spannraum | Alle Vektoren, die aus einer gegebenen Menge gebildet werden können. | Er zeigt, welche Ziele überhaupt erreichbar sind. |
Für mich ist das der Punkt, an dem aus einer Rechenaufgabe Struktur wird. Wer den Spannraum versteht, erkennt schneller, warum manche Aufgaben eine Lösung haben und andere nicht. Gerade in Aufgaben zeigt sich dann schnell, wo Fehler entstehen.
Typische Fehler, die ich in Aufgaben immer wieder sehe
Die meisten Fehler entstehen nicht aus komplizierter Theorie, sondern aus ungenauem Arbeiten. Ich sehe immer wieder dieselben Stolperstellen, und fast alle lassen sich mit etwas Disziplin vermeiden.
- Vorzeichen vertauscht - Ein Minus vor einem Koeffizienten verändert die Richtung des Vektors, nicht nur die Zahl.
- Dimensionen gemischt - Vektoren aus R2 und R3 kann man nicht sinnvoll direkt kombinieren.
- Nur optisch entscheiden - Eine Zeichnung hilft, ersetzt aber keine saubere Komponentenrechnung.
- Koeffizienten als ganze Zahlen behandeln - Brüche und Dezimalzahlen sind erlaubt und oft nötig.
- Unabhängig und eindeutig verwechseln - Nicht jede Kombination liefert automatisch eine eindeutige Lösung.
Warum das in Mathematik, Technik und Datenmodellen wichtig ist
Ich würde das Thema nicht nur als Schulstoff lesen; es ist eine Grundidee, die in technischen Modellen ständig wiederkehrt. In der Computergrafik werden Positionen, Farben und Bewegungen häufig als gewichtete Summen beschrieben. In der Robotik helfen solche Kombinationen bei Koordinatentransformationen und bei der Beschreibung von Bewegungen im Raum. Und in Datenmodellen sind lineare Kombinationen oft die stille Grundlage dafür, dass viele kleine Einflüsse zu einem Ergebnis zusammengesetzt werden.
- 3D-Grafik - Objekte werden aus Richtungsvektoren und Gewichten aufgebaut.
- Physik - Kräfte und Bewegungen lassen sich in Komponenten zerlegen und wieder zusammensetzen.
- Signalverarbeitung - Messwerte werden oft als Mischung mehrerer Grundanteile modelliert.
- Maschinelles Lernen - Modelle arbeiten mit gewichteten Summen von Merkmalen; dort heißen die Zahlen oft Gewichte.
Gerade deshalb ist das Thema nicht nur prüfungsrelevant, sondern auch technisch sehr modern. Wer die Logik verstanden hat, erkennt schneller, wie digitale Systeme aus einfachen Bausteinen komplexe Ergebnisse erzeugen. Für Aufgaben und Klausuren hilft es, diese Logik als feste Arbeitsroutine mitzunehmen.
Die drei Checks, die fast jede Aufgabe entschärfen
Wenn du eine Aufgabe dazu angehst, arbeite immer in derselben Reihenfolge: erst die gegebenen Vektoren sauber notieren, dann die Koeffizienten ansetzen, danach komponentenweise vergleichen. Diese Routine wirkt unspektakulär, spart aber Zeit und verhindert die meisten Denkfehler.
- Formuliere die Kombination immer als Summe aus Skalarmultiplikationen.
- Prüfe, ob die Ausgangsvektoren überhaupt in derselben Dimension liegen.
- Löse die Komponenten als lineares Gleichungssystem und kontrolliere das Ergebnis.
- Nutze die geometrische Vorstellung nur als Kontrolle, nicht als Ersatz für die Rechnung.
Wenn du diese drei Checks sicher beherrschst, wird aus dem Thema schnell ein verlässliches Standardwerkzeug. Genau darin liegt sein Wert: Es ist ein kleines Konzept mit großer Wirkung, weil es Ordnung in Vektoren, Räume und Anwendungen bringt.